На нашем сайте продолжаем демонстрировать уроки для начинающих пользователей Arduino. Сегодняшний урок будет посвящен устройству, работающего на сервоприводе. Такой механизм применяется робототехнике, а в частности, для воспроизведения движений различных роботов, и трекеров для солнечных батарей. В данной статье представлено не только описание устройства, но видео, в котором показан порядок сбора устройства.
Для начала необходимо разобраться, что собой представляет сервопривод. Это такой механизм, местоположением которого можно управлять. Главным отличием от обычного мотора является то, что можно изменить положение вала в необходимое положение, путем введение координат. Как говорилось ранее, мотор применяется для имитации движений роботов.
Видео по сборке модели можно посмотреть в самом конце статьи.
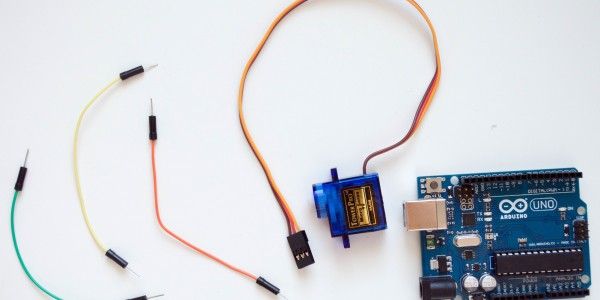
Для того, чтобы собрать такой механизм понадобится:
- Плата Arduino;
- 3 провода;
- Мотор;
- скачать программу Arduino IDE.

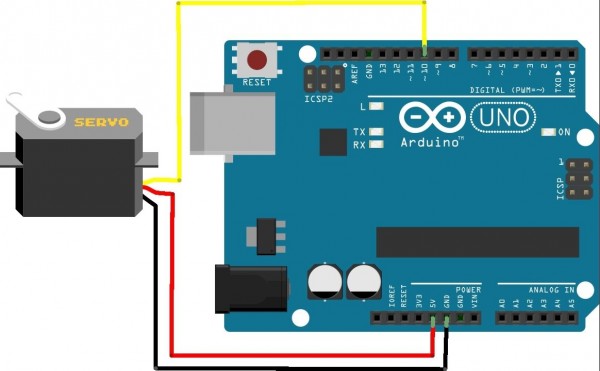
Схема подключения устройства выглядит следующим образом
Чтобы собранный механизм начал работу понадобится программа, которая уже была скачана с официального сайта.
#include <Servo.h> //используем библиотеку для работы с сервоприводом
Servo servo; //объявляем переменную servo типа Servo
void setup() //процедура setup
{
servo.attach(10); //привязываем привод к порту 10
}
void loop() //процедура loop
{
servo.write(0); //ставим вал под 0
delay(2000); //ждем 2 секунды
servo.write(180); //ставим вал под 180
delay(2000); //ждем 2 секунды
}
С помощью последних четырех команд в этом коде вписываются специальные цифры, обозначающие угол поворота вала, а также время, которое выдерживается до следующего поворота. Эти цифры легко изменить. В видео-инструкции было введено такое значение 0-1000-90-1000. Оно обозначает, что поворот осуществляется на 90° с периодом ожидания в 1000 миллисекунд. Время ожидание в данной программе необходимо указывать именно в миллисекундах. Чтобы произвести данную процедуру еще раз используется функция loop.
При сборке данного механизма первый раз использовалась библиотека. Она представляет собой дополнительные команды, которые служат для выполнения работы в упрощенном варианте. В этом примере используется такой набор команд, разработанный специально для Servo h.
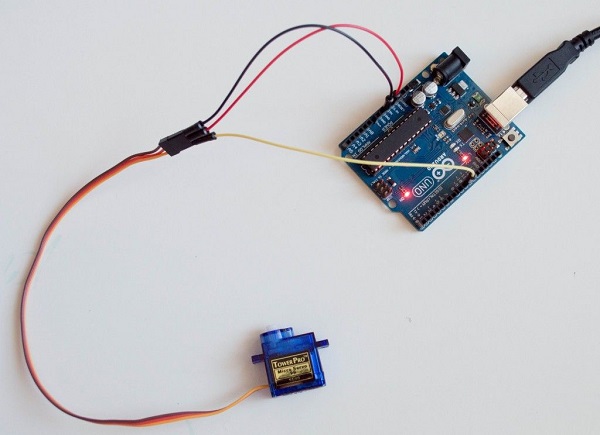
Собранное устройство выглядит так:
 И видео в студию..
И видео в студию..
Рекомендуем:
 Датчик движения своими руками на Arduino
Датчик движения своими руками на Arduino  Самодельный датчик температуры и влажности DHT11 и DHT22 – подключение к Arduino
Самодельный датчик температуры и влажности DHT11 и DHT22 – подключение к Arduino  Биометрический замок – сборка платы управления и программирование микроконтроллера
Биометрический замок – сборка платы управления и программирование микроконтроллера  GPS часы на Arduino
GPS часы на Arduino  Биометрический замок – настройка сканера и программирование микроконтроллера
Биометрический замок – настройка сканера и программирование микроконтроллера  Биометрический замок – окончательный код, вырезание крышки, подготовка гаража
Биометрический замок – окончательный код, вырезание крышки, подготовка гаража  Управление компьютером с дистанционного пульта
Управление компьютером с дистанционного пульта




